





交大自1986年起,即長期致力於「以電腦視覺作陸上自動車導航」之研究,在1988年自製完成全國第一部具有立體電腦視覺的自動車,其後並連續研發出四代有不同視覺及智慧能力之自動車,可供室內外各種自動車應用。
自動駕駛車的展示系統可追溯至1920年代及1930年代間,但要到1950年代才出現可行的實驗,並取得部分成果。第一輛能真正自動駕駛的車則出現於1980年代。從此以後,許多大型公司與研究機構開始製造可運作的自動駕駛車原型。21世紀以後,伴隨著資訊科技的進步,更是突飛猛進,全自動駕駛的車輛在試驗車輛上已經被製造出來,特斯拉汽車率先推出特定環境下的自動駕駛車。
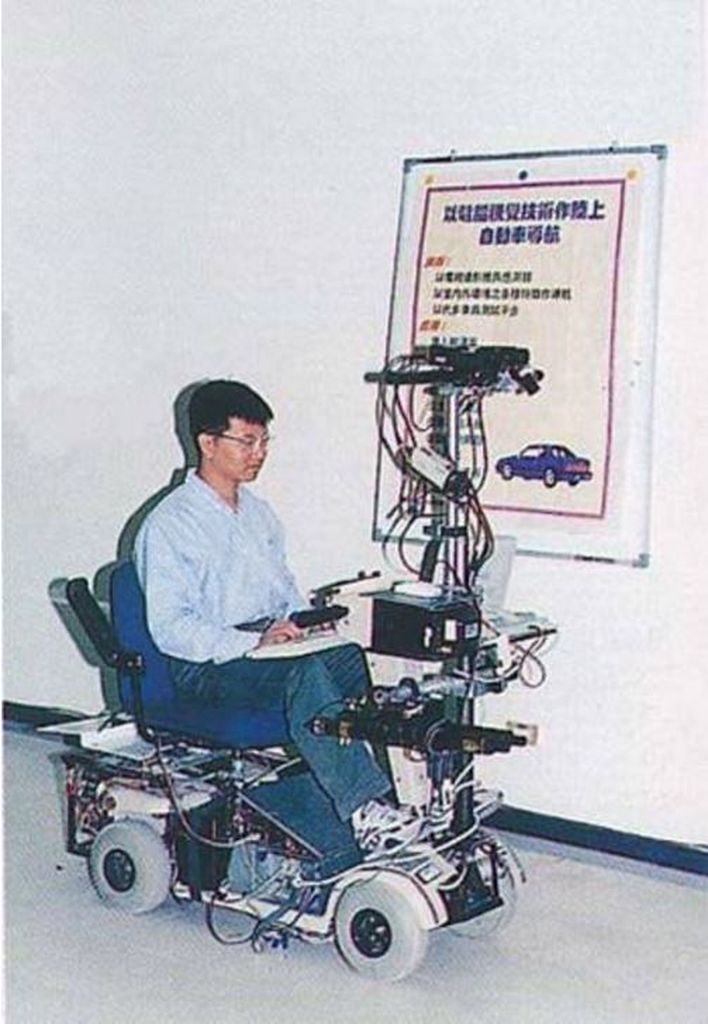
由交大自製的電腦視覺電動車能以相機及單眼電腦視覺技術獲取環境的立體資訊,且具有三軸轉動機械裝置,能控制相機攝取各方向影像,也具有環境影像分析能力,能以無人駕駛、自行避碰方式,航向事先設定終點,更可以自動學習及探索環境能力,能以線上或離線方式學習可行路徑或建構環境模式。除了能無人駕駛之外,還具有偵測及追蹤特定物件或人物能力,可作環境監視及安全巡邏等用途。 根據施仁忠教授回憶,時常會看到蔡文祥教授在交大工程三館測試電動車,坐在電動車上東奔西走。


