
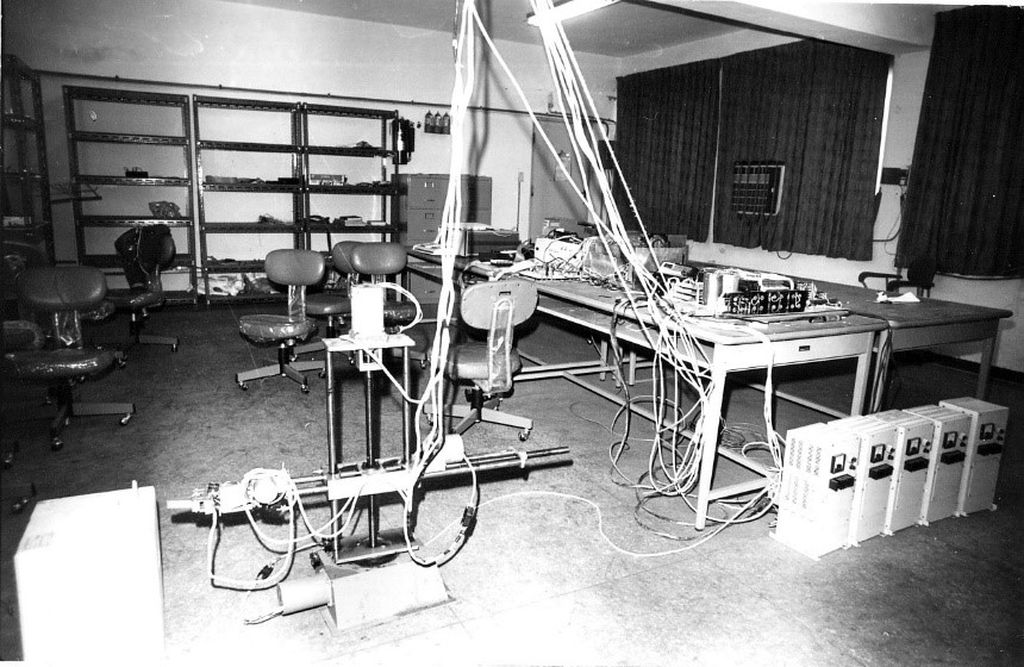





交大於1981年研製成功國內第一部可由程式控制之工業機械手。此可由程式控制之工業機械手是由蔡中川教授及徐佳銘博士共同指導蔡偉建研究生費時一年,自費研製完成。機械手是由一以微電腦為主體的機械人控制單元加上定位控制單元和機械手臂所組成。其中機械手臂是採用五個活動度的機械結構,控制單元由Motorola公司之單板微電腦6800D2所做成,定位控制單元含五個控制器分別控制五個馬達。此系統可經由教導鍵盤來作歸零、人工控制教導、位置資料直接輸入、和重複操作四種操作方式。繼此交大一號機械手後,本校師生又陸續研製成功交大二號、交大三號。
在1956年,世界各國的機械手臂正在萌芽發展階段,這個時期所研發出來的機械手臂多為三個關節軸,而且直到目前為止依然被產業界廣泛應用,尤其對於簡單的加工、夾持與搬運,成為自動化生產製造必備的好夥伴。然而隨著加工方式的多元與複雜化,機械手臂也開始朝著更多關節軸的技術發展。隨著驅動與控制技術的不斷進步,產業用機械手臂也從單點加工,發展到多點同時加工、搬運,這對於生產線的自動化,乃至於整廠自動化的影響都非常大。
蔡中川教授說製作這個工業機械手是因為想要引起政府、社會、工廠之廣泛注意,做進一步的研究發展,因為相較於其他已經將機械手投入生產中的國家,台灣在這方面還遠遠落後於這些國家。


